В механике изучают движение и взаимодействие тел друг с другом. Поэтому принято различать два вида механической энергии: кинетическую энергию, обусловленную движением тел, и потенциальную энергию, обусловленную взаимодействием тел.
\(Е_{к} = \frac{mv^{2}}{2}\),
где Eк — кинетическая энергия тела (Дж);
m — масса тела (кг);
V — скорость тела (м/с).
Из формулы видно, что чем больше масса и скорость тела, тем выше его кинетическая энергия.
Кроме кинетической энергии, связанной с движением тела, существует второй тип энергии ― потенциальная энергия.
В физике потенциальной энергией называют энергию, которая определяется взаимным положением взаимодействующих тел или частей одного и того же тела.
Eп = mgh,
где Eп — потенциальная энергия тела (Дж);
m — масса тела (кг);
h — высота, на которую поднято тело (м)
g — ускорение свободного падения (м/с2).
В этой формуле фигурирует высота h, на которую поднято тело. Отсчитывать эту высоту можно от любого уровня, в зависимости от того, как это удобно сделать в конкретной задаче. Обычно энергию отсчитывают от поверхности земли, стола, пола и так далее.
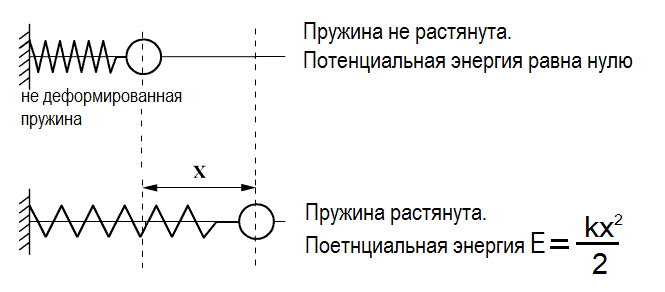
Кроме потенциальной энергии тела, поднятого над землёй, существует ещё потенциальная энергия деформированной (сжатой или растянутой) пружины.
\(Е_{п} = \frac{kx^{2}}{2}\), где
k ― коэффициент упругости (Н/м);
x ― величина деформации (м).
Особый интерес в физике вызывает понятие замкнутой системы.
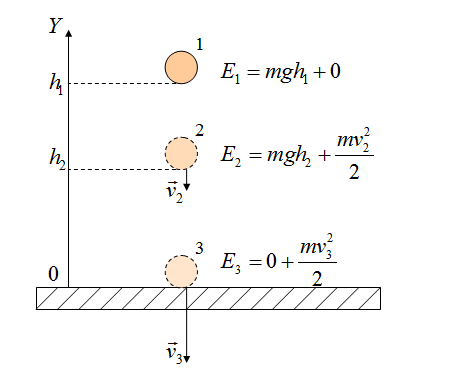
Значимость этого понятия раскрывается при рассмотрении полной механической энергии системы. Оказывается, что в замкнутой системе полная механическая энергия сохраняется. Это утверждение носит название закона сохранения энергии.
Иными словами, если на систему не действуют внешние силы, то энергия в начальный момент равна энергии в конечный момент.
Несмотря на то, что в каждые моменты времени тело двигалось с разной скоростью, энергия в во всех трёх точках была одинакова, вследствие её сохранения E1 = E2 = E3.
\(\overrightarrow{p} = m\overrightarrow{v}\) ,
где \(\overrightarrow{p}\) ― импульс тела (кг∙м/с), m ― масса тела (кг), \(\overrightarrow{v}\) ― скорость тела (м/с).
Импульс ― векторная величина и сонаправлена со скоростью тела.
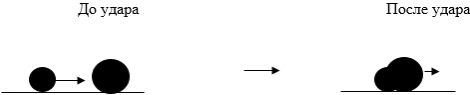
Тела могут обмениваться импульсами. Например, если движущийся шарик столкнется с покоящимся, то дальше они оба приобретут скорость и начнут двигаться. Для того, чтобы понять, как передается импульс и вычислить его, возникла необходимость распознавать разные виды ударов.
Удар, после которого тела слипаются и двигаются вместе ― абсолютно неупругий.
Возникает вопрос: зачем вообще нужен этот импульс?
На самом деле импульс ― это еще одна величина, которая, как и энергия сохраняется. Как и для энергии, для импульса существует закон сохранения и формулируется он очень похоже: в замкнутой системе векторная сумма импульсов всех тел системы постоянна. Именно свойство сохранения импульса делает его такой важной для нас величиной.
\(\overrightarrow{p_{1}} + \overrightarrow{p_{2}} = \overrightarrow{p_{1}}' + \overrightarrow{p_{2}}'\)
для абсолютно упругого удара:
\(m_{1}\overrightarrow{v_{1}} + m_{2}\overrightarrow{v_{2}} = m_{1}\overrightarrow{u_{1}} + m_{2}\overrightarrow{u_{2}}\)
для абсолютно неупругого удара:
\(m_{1}\overrightarrow{v_{1}} + m_{2}\overrightarrow{v_{2}} = (m_{1} + m_{2})\overrightarrow{u}\) .
Если при отсутствии внешних сил импульс сохраняется, то, когда появятся внешне силы, он начнет изменяться. Причем важно не только значение воздействующей силы, но и время ее воздействия:
где \(\mathrm{\Delta}\overrightarrow{p}\) ― изменение импульса (кг·м/с),
\(\overrightarrow{F}\) ― сила (Н),
∆t ― время (с).

Наши социальные сети
Подписывайся!
Экономь время
на подготовке в ТГ
Забирай полезные чек-листы, памятки и лайфхаки
Подписаться →

Изучай новое
без усилий в ВК
Смотри полезные видео и вебинары, где объясняем сложное простым языком
Подписаться →

Забирай полезное в Максимум БЛОГЕ
Узнай первым лайфхаки по решению заданий предстоящего экзамена
Подписаться →

Содержание